Microbrain ITS-AX3-4 járműérzékelő érzékelő

Kérjük, figyelmesen olvassa el ezt a kézikönyvet a telepítés előtt. Köszönjük, hogy megvásárolta az ütközésgátló radartermékünket. Annak érdekében, hogy a radar a lehető legjobban működjön, kérjük, figyelmesen olvassa el ezt a használati útmutatót, és szigorúan a kézikönyvnek megfelelően telepítse és működtesse. A termék hardver- és szoftvertervének szerzői jogait törvény védi, és azokat egyetlen egység vagy személy sem sértheti meg. A minőség és a teljesítmény további javítása érdekében a termék műszaki jellemzői és kialakítása előzetes értesítés nélkül megváltozhat. Kérlek értsd meg.
Bevezetés
- A kapu járműérzékelő radarja a be- és kijáratok, például parkolók és mélygarázsok kezelési igényeire lett kifejlesztve.
- Pontosan tudja szabályozni a kapurúd emelkedését és süllyedését, ha együttműködik a kapugép fő vezérlőtáblájával. Ugyanakkor hatékonyan meg tudja akadályozni, hogy a kapurúd „véletlenül megsértse” a radartéren áthaladó célpontot. view, megvalósítva az intelligens anti-smashing.
- A radar egy erősen integrált RF chip SoC megoldást alkalmaz, amelynek jellemzői a kis méret, alacsony költség, egész napos és minden időjárási viszonyok között történő működés, nagy észlelési érzékenység, nagy pontosság, egyszerű hibakeresés és telepítés, valamint stabil és megbízható.
- Ennek a radarnak a működési frekvenciája 60-64 GHz, lineáris frekvenciamodulációs folyamatos hullámformával és akár 4 cm-es távolsági felbontással. A milliméteres hullámantenna több adási és vételi módszert alkalmaz, nagy szögfelbontással és szögmérési pontossággal.
- A szoftver és a hardver együttes optimalizálása révén ez a termék pontosan azonosítja és megkülönbözteti a gyalogosokat, járműveket és egyéb célpontokat, amelyek áthaladnak a kapurács területén, elkerülve az olyan jelenségeket, mint az „autók összetörése”, az „emberek összetörése” és a „nem leeső rács”.
Műszaki előírások
| Funkció | Paraméter | Műszaki mutatók |
|
Rendszer tulajdonságai |
Operation Voltage | 9-24V (12V/1A) |
| Üzemi hőmérséklet | -40℃~ +85℃ | |
| Hatalom | < 0.5W | |
| Védő szint | IP55 | |
| Kommunikációs interfész |
RS485;Bluetooth |
|
| Kagylóméret | 107.6*73.3*18.3 mm | |
|
Tartomány észlelése |
Érzékelési szélesség |
Az alapértelmezett beállítás a
±0.5 méter, belül testreszabható ±1.5 méter a tényleges körülményeknek megfelelően. |
| Érzékelési távolság | 1-6 m (alapértelmezett 3 m) | |
| Frissítés és hibakeresés | Online hibakeresés | 485;Bluetooth |
| Online frissítés | 485;Bluetooth | |
| Alkalmazás | Egyenes gémsorompó
3.Jellemzők |
|
Jellemzők
A radar megjelenése az 1. ábrán látható. Főbb jellemzői:
LED kijelző:
- Az érzékelő elején két LED jelzőfény található. A piros a tápellátás jelzőfénye, amely a tápfeszültség bekapcsolása után is égve marad; a zöld az állapotjelző lámpa, amely kigyullad, ha célpontot észlel a területen, és kialszik, ha a cél eltűnik;
Érzékelési terület konfigurációja:
- Az érzékelő alapértelmezett érzékelési területe 3 méter előre, és különböző érzékelési területek állíthatók be a mobiltelefonos alkalmazáson vagy a számítógépes hibakereső szoftveren keresztül;
Konfigurációs paraméter mentése:
- Automatikusan el tudja menteni az észlelési területet és más konfigurációkat, és áramkimaradás és újraindítás után használhatja a legutóbb mentett konfigurációs paramétereket;
Firmware frissítés:
- Nem kell szétszerelni és telepíteni, a firmware-t online frissíteni a 485/Bluetooth interfészen keresztül, és a frissítés befejezése után újra kell indítani az érzékelőt, hogy életbe lépjen;
Stabil teljesítmény:
- Az érzékelő működését nem befolyásolja a külső környezet, például fény, por, eső és hó.
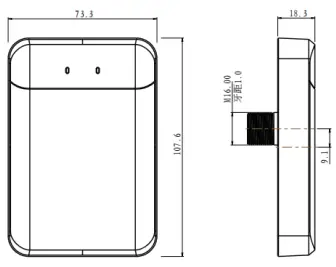
- A járműérzékelő érzékelő megjelenése és méretei
Telepítési útmutató
- Az érzékelőt a sorompó kapu dobozának felületére és a talajhoz képest függőlegesen kell felszerelni. A telepítésnek az alábbi lépéseket kell követnie:
1. lépés: Erősítse meg a radar felszerelési furatának helyzetét
- Az egyenes rúd belső oldala 200-300 mm-re van a radar beépítési furatának helyzetétől, 650-750 mm-re a sáv talajától (nem a biztonsági szigettől) (személygépkocsik és kisteherautók esetében), 750-800 mm (700 mm-nél magasabb alvázú teherautók esetén); a beépítési helyzet a 2. ábrán látható.
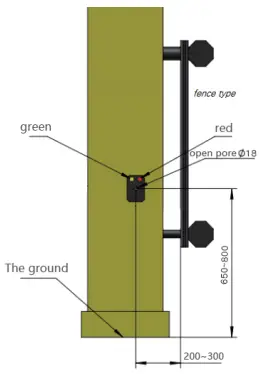
- Az érzékelő beépítési helyének sematikus diagramja
2. lépés: Beépítési lyuk
- Elektromos fúróval fúrjon M16-hoz megfelelő rögzítőfuratot a kapudoboz kiválasztott pozíciójában. Az ajánlott lyukfúró átmérője 18 mm.
3. lépés: Telepítés és rögzítés
- Amint az alábbi ábrán látható, a radar az alsó csavarokon keresztül van rögzítve a kapudobozhoz (a nyomaték értéke kisebb, mint 20 N.m). Először helyezze be a radart a kapudobozba, majd fedje le tömítéssel és húzza meg egy M16-os csavarral, majd helyezze be a kábelköteg végét lefelé a radarba és húzza meg a fémcsatot. A végső telepítési hatás a 3. ábrán látható.
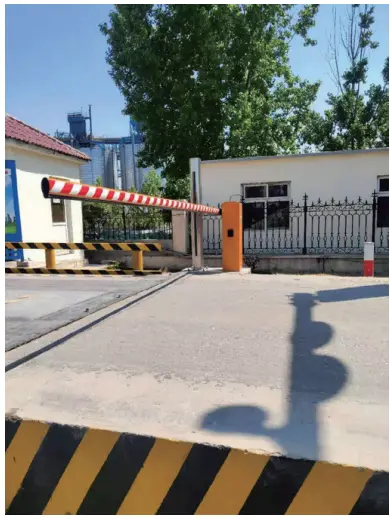
- Kapuradar beépítési hatás diagram
Kábel interfész meghatározása
| Nem | Kábel azonosító | Szín | Leírás |
| 1 | 12V | Piros | Pozitív |
| 2 | GND | Fekete | Negatív |
| 3
4 |
B-/RX
A+/TX |
Fehér
Szürke |
485 B-
485 A+ |
| 5 | NO1 | Kék | Általában nyitott 1 |
| 6 | NO1 | Zöld | Általában nyitott 1 |
| 7 | NC2 | Barna | Általában bezár 2 |
| 8 | NC2 | Lila | Általában bezár 2 |
A kábelköteg-funkciók és csatlakozási kapcsolatok a következők:
Tápfeszültség csatlakozás
- A piros „12V” vezeték a 12V-os tápegység pozitív kimeneti csatlakozójához csatlakozik;
- A „GND” fekete vezeték a 12 V-os tápegység negatív kimeneti kapcsára csatlakozik.
Kapuvezérlő jel
- A zöld és kék vezetékek a relé alaphelyzetben nyitott jelei, amelyek összekötik a földérzékelő tekercs kivezetését és a kapu vezérlődobozának közös kivezetését (nem tesz különbséget pozitív és negatív között).
485 vonalas csatlakozás
- Szürke vezeték csatlakozik a 485-ös vonal T/R+ végéhez; A fehér vezeték a 485-ös vonal T/R-végéhez csatlakozik.
Bluetooth kapcsolat
- Bluetooth név: „Radar…” vagy „Mbit…”; Felhasználói jelszó: 88888888.
Konfigurációs utasítások
- Az érzékelő mobilalkalmazással vagy számítógépes szoftverrel konfigurálható.
Mobilalkalmazás konfigurációja:
- A mobil hibakereső alkalmazás telepítése után nyissa meg a szoftvert a 4. ábrán látható módon, kattintson az Eszköz csatlakoztatása elemre, az 5. ábrán látható módon, és válassza a Bluetooth párosítási kapcsolatot a „Radar…” funkcióval.
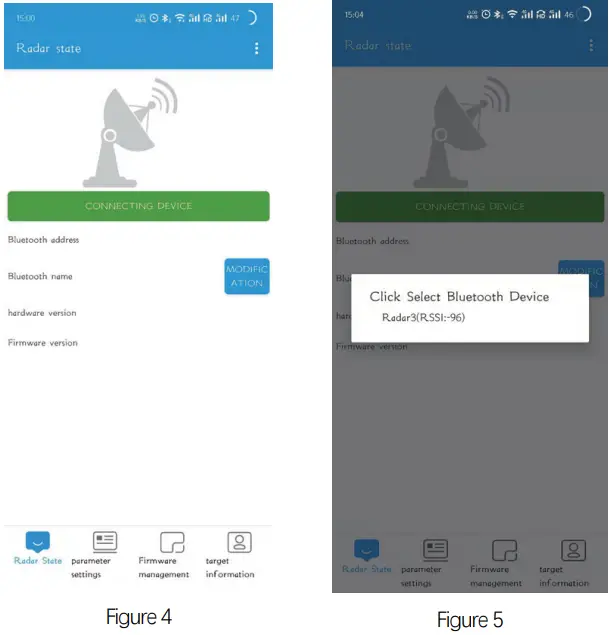
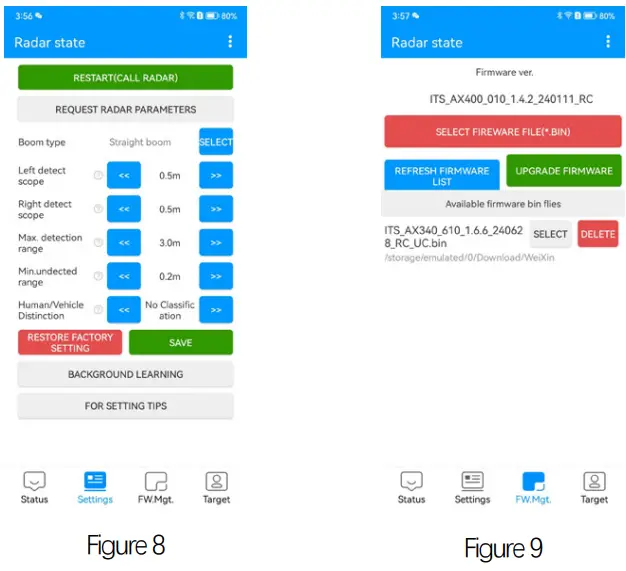
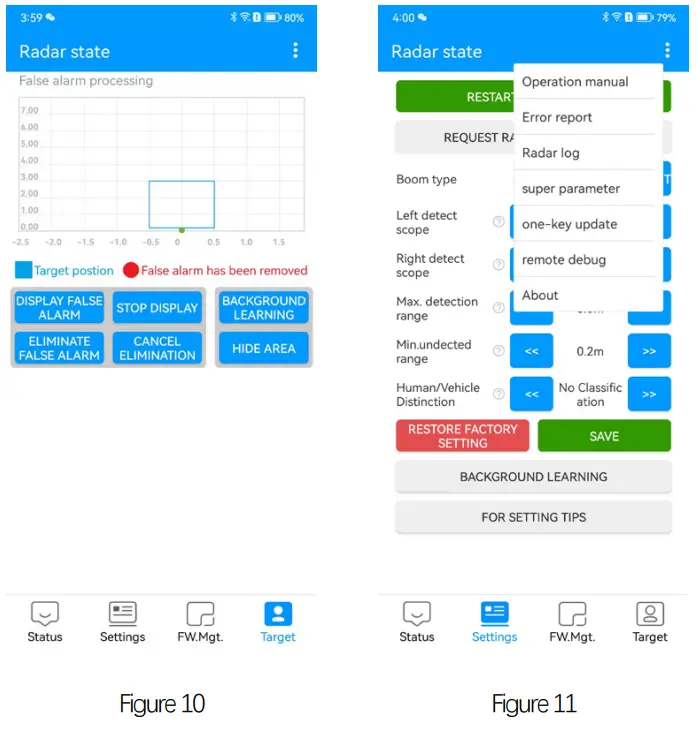
- A csatlakozás után válassza ki a radar módot a 6. ábrán látható módon, és lépjen be az alkalmazás felületére a 8., 9., 10. és 11. ábrán látható módon.
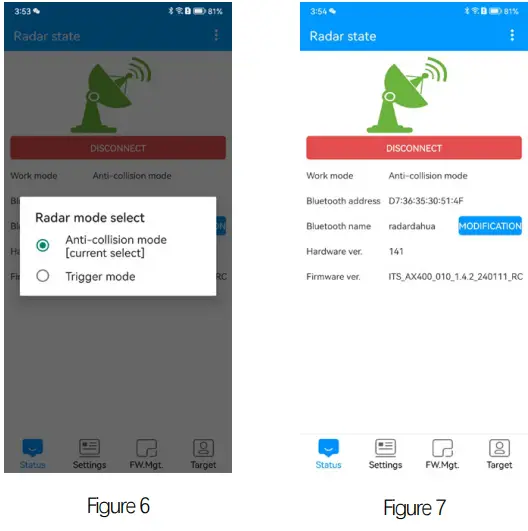
- Módosíthatja az érzékelő paramétereit, és megtanulhatja a hátteret az aktuális környezetnek megfelelően. A radar firmware frissítéséhez válassza ki a firmware-t, kattintson a Firmware frissítése lehetőségre, majd várja meg, amíg a frissítés befejeződik.
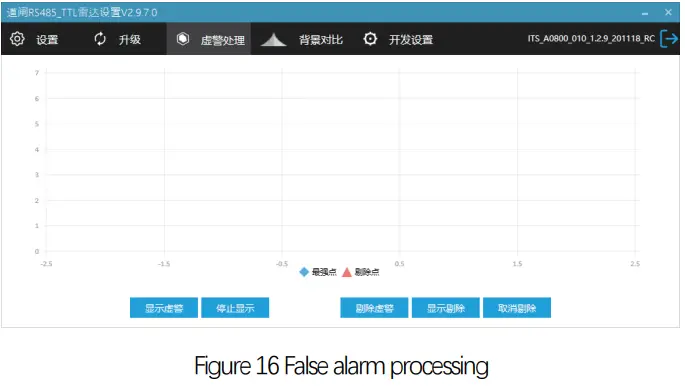
- A háttértanulás befejezése után kattintson a Hamis riasztás megjelenítése lehetőségre view téves riasztások. A téves riasztások megjelenítése közben a kijelző leállításán kívül ne végezzen más műveletet.
- További részletes műveletekért tekintse meg a termék kézikönyvét és az APP kézikönyvét.
Számítógépes szoftver hibakeresési utasításai
1. lépés:
- Használja az USB-485 kábelt a radar számítógéphez való csatlakoztatásához. A radar interfészhez lásd: „5. Kábel interfész leírása”.
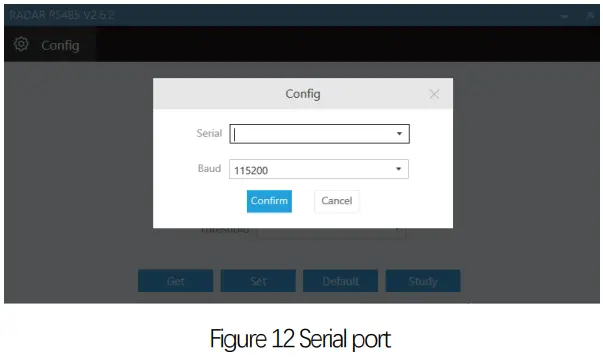
2. lépés:
- Nyissa meg a hibakereső szoftvert, válassza ki a soros portot és az adatátviteli sebességet, majd kattintson a „Megerősítés” gombra.
3. lépés:
- Először a Get gombra kattintva lekérdezheti a radar aktuális beállítási paramétereit.
4. lépés:
- Adja meg a kívánt beállítási paramétereket a megfelelő opciókban, majd válassza a „Reset” lehetőséget az érzékelő mentéséhez
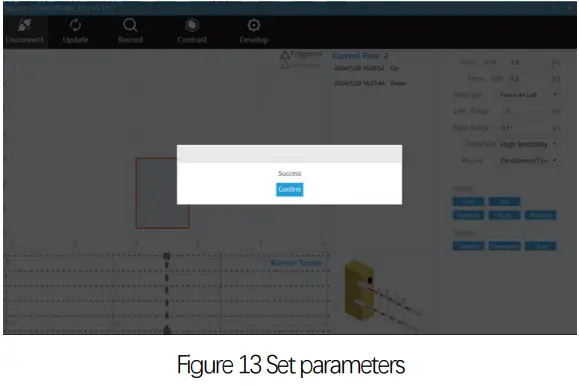
Radar paraméter leírása
| Paraméter magyarázata | |
|
Maximális elülső távolság |
Az alapértelmezett érték 3 méter, amit a sorompóoszlop hosszának megfelelően kell beállítani. |
|
Minimális elülső távolság |
Az alapbeállítás 0.2 méter, ami a radar közeli nem észlelési tartománya, és a helyszíni körülmények alapján állítható. |
| Bal tartomány | Az alapértelmezett beállítás ±0.5 méter, és az egyenes rúd ±1.5 méteren belül testreszabható a tényleges körülményeknek megfelelően. |
| Megfelelő tartomány | |
|
Akadály típusa |
Az alapértelmezett sorompótípus az „egyenes kar” |
|
Napló |
Jegyezze fel az érzékelő relé állapotát, amikor a jármű elhalad mellette |
- Kattintson a Reset gombra, hogy az új beállítási paraméterek a radar újraindítása után érvénybe lépjenek.
- Kattintson a „get” gombra az aktuális radarkonfiguráció megtekintéséhez.
- Kattintson a „gyári beállítások” gombra a radar alapértelmezett konfigurációjának visszaállításához.
5. lépés:
- A beállítások elvégzése után kattintson a „Self-learn-ing” gombra a környezeti háttér megismeréséhez és rögzítéséhez. A művelet befejezése után indítsa újra a radar működését.
- Egyenes pólusú sorompók esetén győződjön meg arról, hogy nincs mozgatható célpont a radar észlelési területén, emelje fel az egyenes oszlopot, majd kattintson az „Öntanulás” gombra.
- Várjon 6 másodpercet, és indítsa újra a radart. A felület a tanulás során a következő:
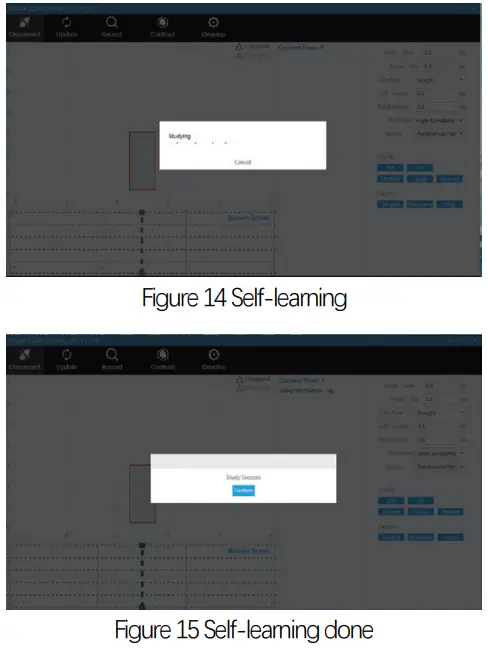
- A betanulás befejezése után kattintson a lágy újraindítás gombra az érzékelő újraindításához.
Megjegyzések:
- Az „öntanulás” során győződjön meg arról, hogy nincsenek mozgatható tárgyak az érzékelő érzékelési területén. Ha a környezeti háttér betanulása és rögzítése során egy célpont belép vagy áthalad az érzékelő érzékelési területén, akkor az érzékelőt újra kell indítani és újra kell tanulni;
6. lépés: Ellenőrizze az érzékelő interferenciáját
Az érzékelő első hibakeresésekor, miután a környezettanulás befejeződött, ezzel a funkcióval ellenőrizheti, hogy nincs-e interferencia az érzékelő előtt.
- Nyissa meg a hibakereső szoftvert.
- Válassza a „False Alarm Handling” lehetőséget.
- Kattintson a „Hamis riasztás megjelenítése” elemre view célinformáció.
- Kattintson a „Hamis riasztás eltávolítása” gombra a téves riasztási interferencia eltávolításához.
- Ha nincs célinterferencia a bot érzékelési tartományán belül, a radar normál módon használható.
Óvintézkedések
- A tápegység voltage stabil, hogy ne befolyásolja a radar teljesítményét. A tápellátáshoz külön külső 12V/1A hálózati adapter használata javasolt.
- A radarantenna be van építve. Ha a radar felületét idegen tárgyak borítják (például vízcseppek, fagy, eső, hó, por stb.), amelyek befolyásolják a radar normál működését, időben meg kell tisztítani.
- Az észlelési környezet megváltozása után (például vezetőoszlopok, jégkrémek stb. felszerelése az észlelési területen), kérjük, tanulja meg újra és rögzítse a környezetet.
- A radar érzékelési tere view nem lehetnek olyan tárgyak, amelyek befolyásolják a célérzékelést (például fém kerítések, hirdetőtáblák, rendszámfelismerő kamerák, falak stb.), hogy elkerüljék a radarral való interferenciát.
- Nem ajánlott a radar használata egycsatornás kevert és vegyes forgatókönyvekben, kerítésekkel és óriásplakát oszlopokkal.
- Javasoljuk a kettős radar beépítési megoldást vagy a kapurúd távirányítóját olyan esetekben, amikor félpótkocsik, cementszállító tartálykocsik stb. vannak 1 méternél nagyobb testközökkel.
- Ezt a terméket nem ajánlott sáros utakon alkalmazni. A szélsőséges időjárás (erős eső, heves hó) befolyásolhatja a radar teljesítményének stabilitását.
- Általában az érzékelési távolságot a rúd hosszának megfelelően állítsa be. Az észlelési távolságnak valamivel kisebbnek vagy egyenlőnek kell lennie az oszlop hosszával, hogy megakadályozza a kapun kívüli személyek vagy tárgyak áthaladását és a radar általi észlelését.
- A környezet tanulása és rögzítése során az egyenes rúd megremeghet, amikor az oszlop leejtése után a földre esik. A további műveletek elvégzése előtt várja meg, amíg az oszlop teljesen stabil lesz.
- Ha a radar okozta visszapattanó pólust, kérjük, tanulja meg újra a hátteret.
- Ha egy erős fém szóródó tárgy (például egy vaslemez), például egy gyorshajtómű közvetlenül a radar előtt helyezkedik el, a radar beépítési magassága 750-800 mm.
- Ha speciális környezetben kell radart telepíteni, kérjük, először vegye fel a kapcsolatot cégünkkel, majd a javaslatoknak megfelelően telepítse megfelelően.
Gyakori hibaleírás
- Hibajelenség: A beszerelés után a radar zöld lámpája mindig világít és az oszlop nem esik le.
- Lehetséges ok: A radar érzékelési tartományán belül egy új, továbbfejlesztett reflektor található, amelyet ki kell mozdítani a radar tartományából. view vagy a háttér újratanulását.
- Hibajelenség: A zöld lámpa nem világít, ha valaki a radar előtt áll.
- Lehetséges ok: Az ember-jármű megkülönböztető funkció engedélyezve van. Miután a jármű kiváltja a radar zöld fényét, a radar elkezdi érzékelni, hogy a személy vagy a jármű megkülönböztethető-e.
- Hibajelenség: Miután a radar csatlakoztatva van a kapuvezérlő kártya 12 V-os tápegységéhez, a piros lámpa villog, és a tápellátás nem elegendő.
- Lehetséges ok: A tápellátáshoz külső 12V-1A hálózati adapter csatlakoztatása javasolt.
Csomagolási lista
| Nem | Alkatrészek | Menny |
| 1 | Érzékelő | 1 |
| 2 | M16 anya | 1 |
| 3 | Tömítés | 1 |
| 4 | Kábelköteg | 1 |
| 5 | Bizonyítvány | 1 |
| 6 | Felhasználói kézikönyv | 1 |
FCC nyilatkozat
Bármilyen változtatás vagy módosítás, amelyet a megfelelőségért felelős fél kifejezetten nem hagyott jóvá, érvénytelenítheti a felhasználó jogosultságát a berendezés üzemeltetésére. Ez az eszköz megfelel az FCC-szabályok 15. részének. A működés az alábbi két feltételhez kötött:
- Ez az eszköz nem okozhat káros interferenciát, és
- Ennek az eszköznek el kell viselnie minden interferenciát, beleértve a nem kívánt működést okozó interferenciát is.
FCC sugárterhelési nyilatkozat:
- Ez a berendezés megfelel az FCC szabályozatlan környezetre meghatározott sugárterhelési határértékeinek. Ezt a jeladót nem szabad más antennával vagy adóval együtt elhelyezni, vagy azzal együtt működtetni. Ezt a berendezést úgy kell felszerelni és üzemeltetni, hogy a sugárzó és a test között legalább 20 cm távolság legyen.
Megjegyzés:
- Ezt a berendezést tesztelték, és megállapították, hogy megfelel a B osztályú digitális eszközökre vonatkozó határértékeknek, az FCC-szabályok 15. része szerint.
- Ezeket a határértékeket úgy alakították ki, hogy ésszerű védelmet nyújtsanak a káros interferencia ellen lakossági telepítés során.
- Ez a berendezés rádiófrekvenciás energiát állít elő, használ és sugározhat ki, és ha nem az utasításoknak megfelelően telepítik és használják, káros interferenciát okozhat a rádiókommunikációban.
- Nincs azonban garancia arra, hogy egy adott telepítés során nem lép fel interferencia.
- Ha ez a berendezés káros interferenciát okoz a rádió- vagy televízióvételben, ami a berendezés ki- és bekapcsolásával állapítható meg, a felhasználónak arra biztatjuk, hogy próbálja meg kiküszöbölni az interferenciát az alábbi intézkedések közül egy vagy több segítségével:
- Irányítsa át vagy helyezze át a vevőantennát.
- Növelje a távolságot a berendezés és a vevő között.
- Csatlakoztassa a berendezést a vevőegységtől eltérő áramkörön lévő aljzathoz.
- Kérjen segítséget a kereskedőtől vagy egy tapasztalt rádió-/TV-szerelőtől.
Gyakran Ismételt Kérdések
K: Beállítható az érzékelési tartomány?
V: Igen, az érzékelési tartomány a mobilalkalmazáson vagy a számítógépes szoftveren keresztül állítható.
K: Hogyan lehet frissíteni a firmware-t?
V: A firmware online frissíthető a 485/Bluetooth interfészen keresztül, szétszerelés nélkül.
Dokumentumok / Források
 |
Microbrain ITS-AX3-4 járműérzékelő érzékelő [pdf] Felhasználói kézikönyv ITS-AXX-XX, ITS-AX3-4 járműérzékelő érzékelő, ITS-AX3-4, járműérzékelő érzékelő, érzékelő érzékelő, érzékelő |